|
altEngine
|
|
altEngine
|
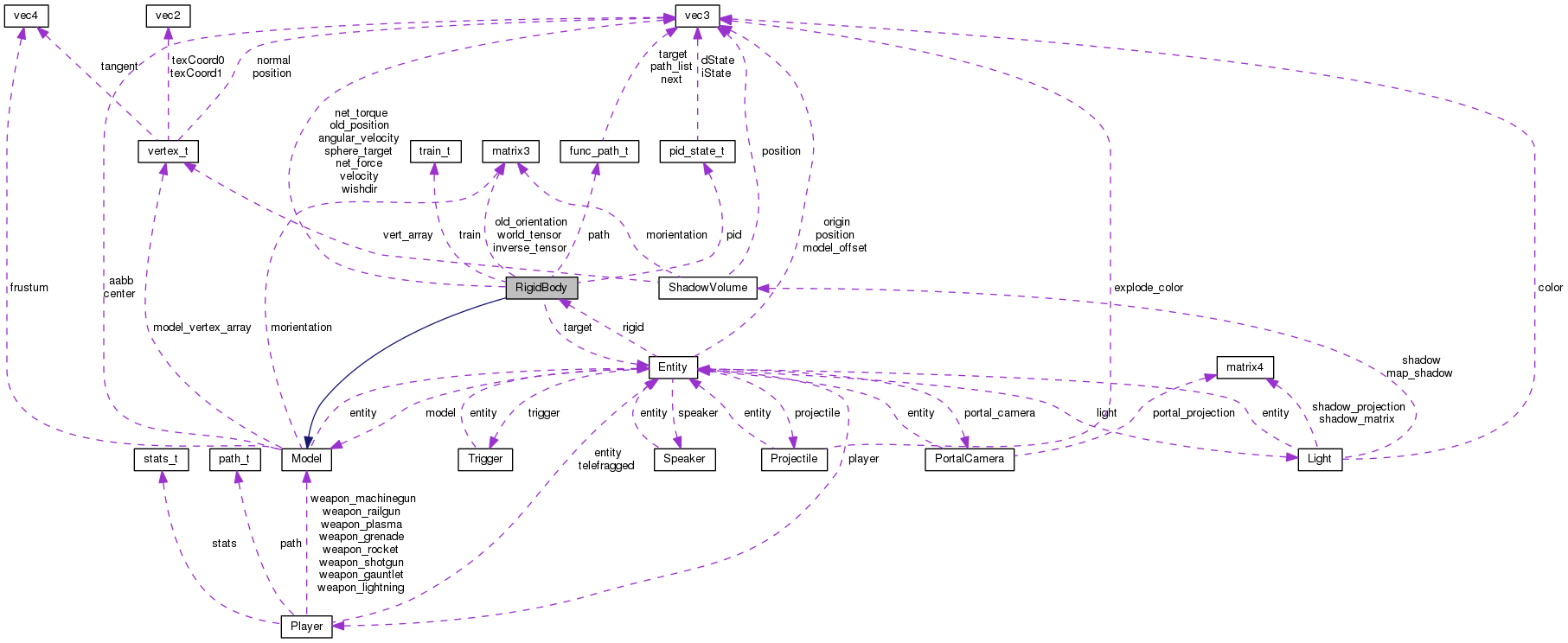
#include <rigidbody.h>
Public Member Functions | |
| RigidBody (Entity *entity) | |
| void | recalc () |
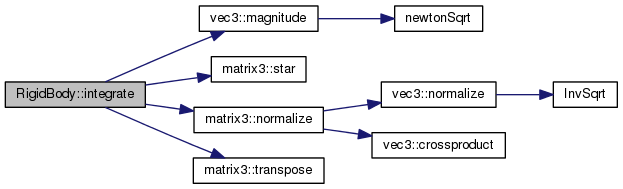
| virtual void | integrate (float time) |
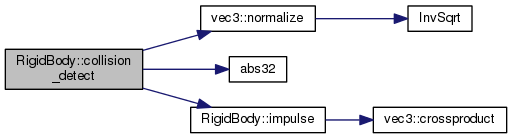
| bool | collision_detect (vec3 &v) |
| bool | collision_detect (Plane &p) |
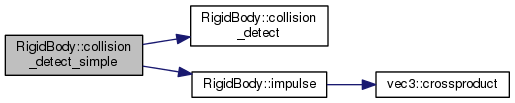
| bool | collision_detect_simple (RigidBody &body) |
| bool | collision_detect (RigidBody &body) |
| bool | collision_distance (RigidBody &body) |
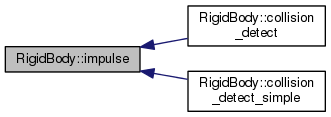
| void | impulse (Plane &plane, vec3 &vertex) |
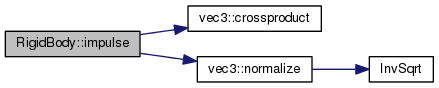
| void | impulse (RigidBody &rigid, vec3 &point) |
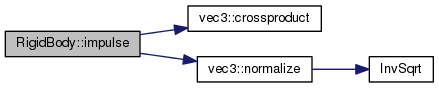
| void | impulse (RigidBody &rigid, vec3 &point, Plane &plane) |
| void | frame2ent (Frame *camera_frame, input_t &input) |
| void | frame2ent_yaw (Frame *camera_frame, input_t &input) |
| void | save_config (cfg_t &config) |
| void | load_config (cfg_t &config) |
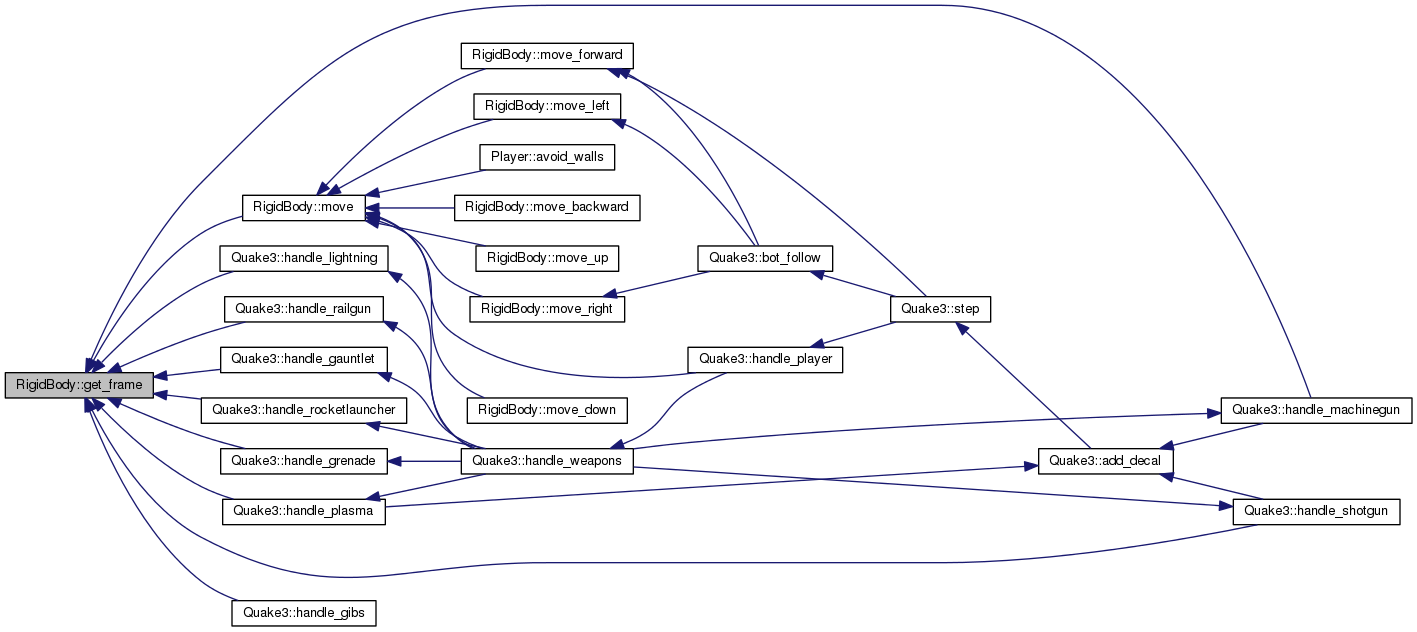
| void | get_frame (Frame &frame) |
| void | seek (const vec3 &position) |
| void | flee (const vec3 &position) |
| void | arrive (const vec3 &position) |
| void | pursue () |
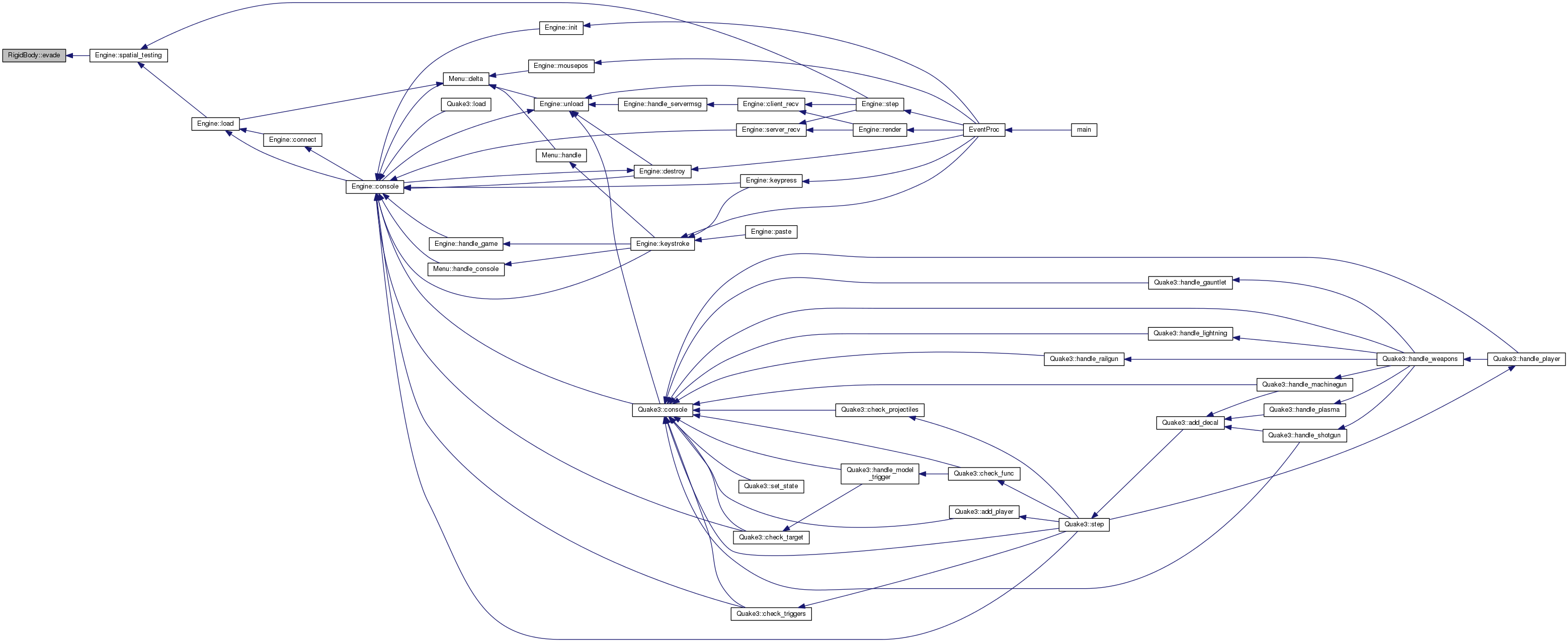
| void | evade () |
| void | wander (float radius, float distance, float jitter) |
| void | set_target (Entity &target) |
| bool | move (input_t &input, float speed_scale) |
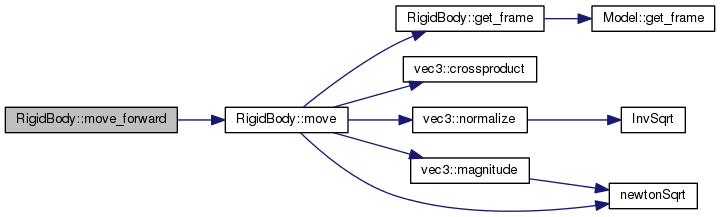
| void | move_forward (float speed_scale) |
| void | move_backward (float speed_scale) |
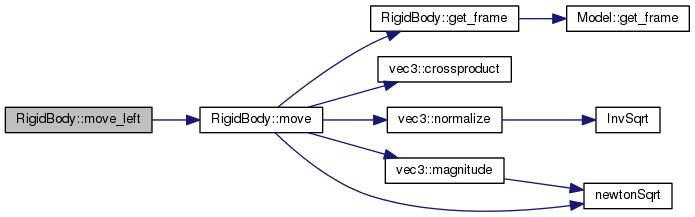
| void | move_left (float speed_scale) |
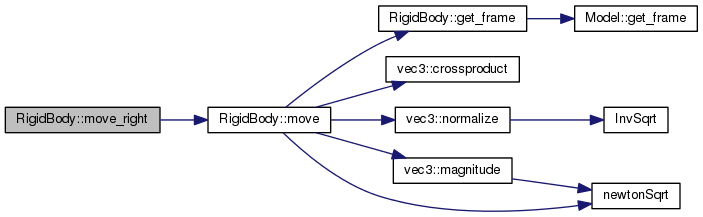
| void | move_right (float speed_scale) |
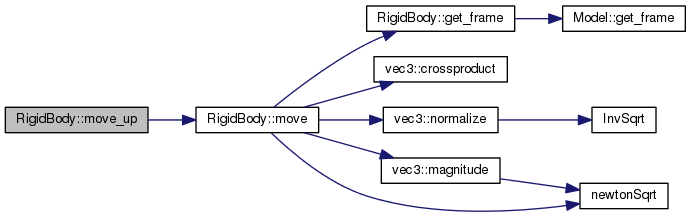
| void | move_up (float speed_scale) |
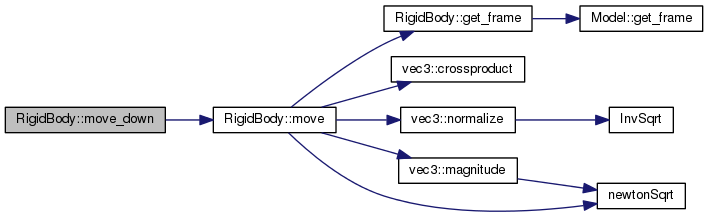
| void | move_down (float speed_scale) |
| void | lookat (vec3 &target) |
| void | lookat_yaw (vec3 &target) |
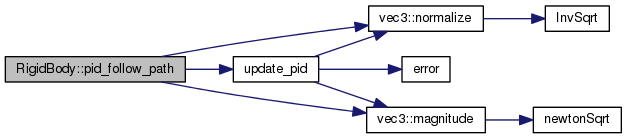
| void | pid_follow_path (vec3 *path_list, int num_path, float max_velocity, float distance, int wait) |
| int | train_follow_path (vec3 *target, float max_velocity, float distance, int wait) |
| float | get_volume () |
| float | get_height () |
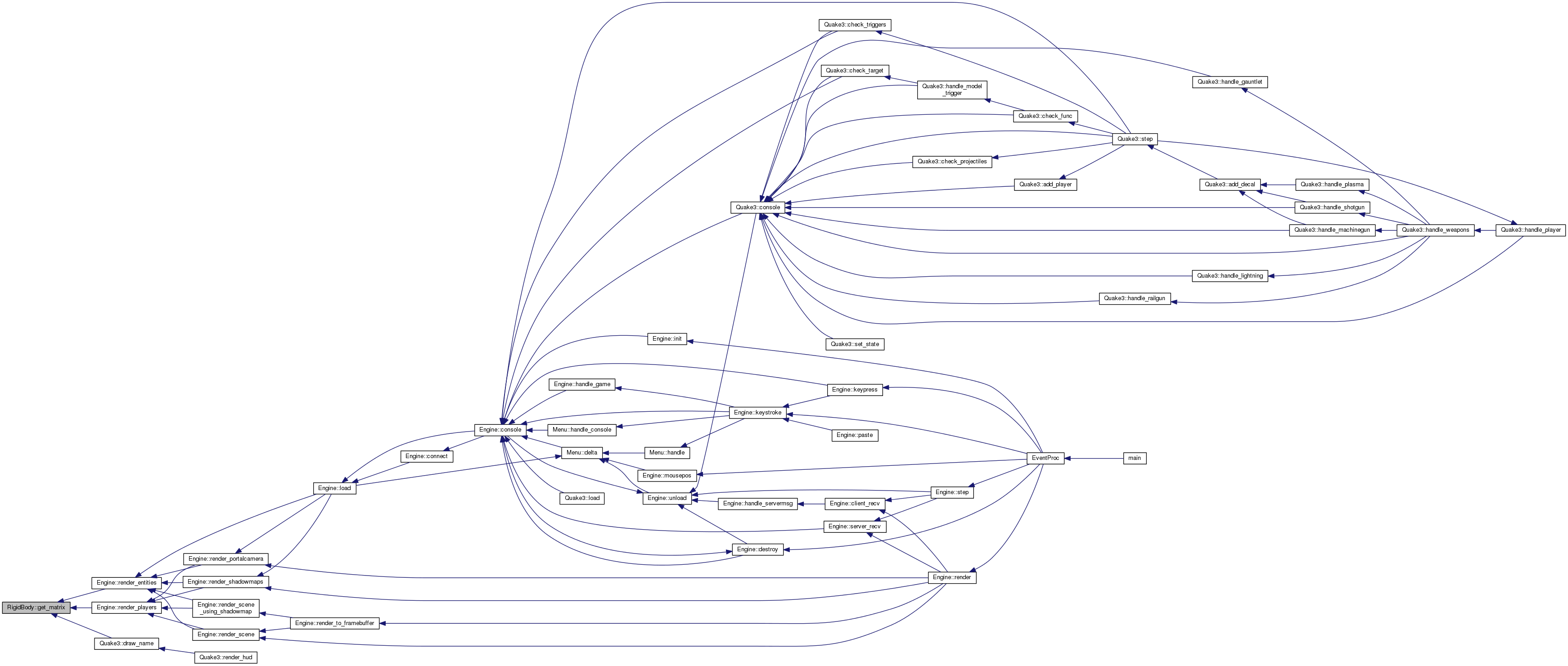
| float * | get_matrix (float *matrix) |
 Public Member Functions inherited from Model Public Member Functions inherited from Model | |
| Model (Entity *entity) | |
| Model () | |
| virtual | ~Model () |
| void | calc_frustum (matrix4 &clip) |
| void | load (Graphics &gfx, char *file) |
| void | create_box (Graphics &gfx, vec3 *aabb) |
| void | render (Graphics &gfx) |
| void | render_box (Graphics &gfx) |
| void | clone (Model &model) |
| void | getForwardVector (vec3 &forward) |
| void | make_aabb () |
Additional Inherited Members | |
| Static Public Member Functions inherited from Model | |
| static void | CreateObjects (Graphics &gfx) |
| Static Public Attributes inherited from Model | |
| static int | quad_vertex = 0 |
| static int | quad_index = 0 |
| static int | cube_vertex = 0 |
| static int | cube_index = 0 |
| static int | skybox_vertex |
| static int | skybox_index |
| RigidBody::RigidBody | ( | Entity * | entity | ) |

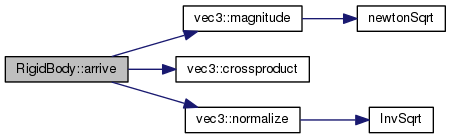
| void RigidBody::arrive | ( | const vec3 & | position | ) |
| bool RigidBody::collision_detect | ( | vec3 & | v | ) |

| bool RigidBody::collision_detect | ( | Plane & | p | ) |

| bool RigidBody::collision_detect | ( | RigidBody & | body | ) |
| bool RigidBody::collision_detect_simple | ( | RigidBody & | body | ) |
| bool RigidBody::collision_distance | ( | RigidBody & | body | ) |


| void RigidBody::evade | ( | ) |

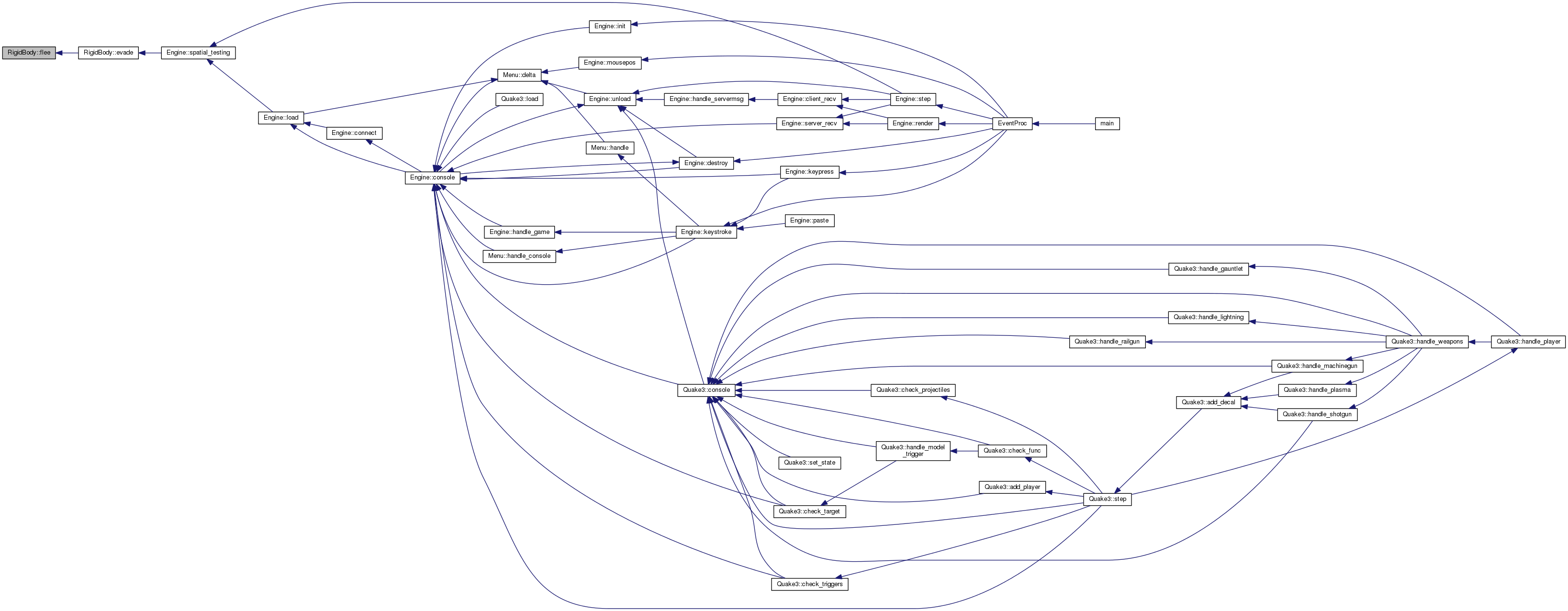
| void RigidBody::flee | ( | const vec3 & | position | ) |



|
virtual |
Reimplemented from Model.

| float RigidBody::get_height | ( | ) |


|
virtual |
| float RigidBody::get_volume | ( | ) |


|
virtual |

| void RigidBody::load_config | ( | cfg_t & | config | ) |

| void RigidBody::lookat | ( | vec3 & | target | ) |


| void RigidBody::lookat_yaw | ( | vec3 & | target | ) |


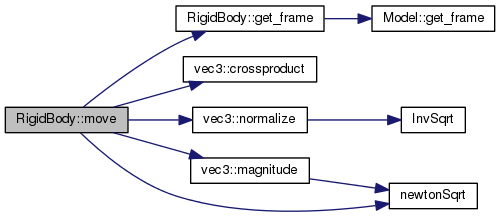
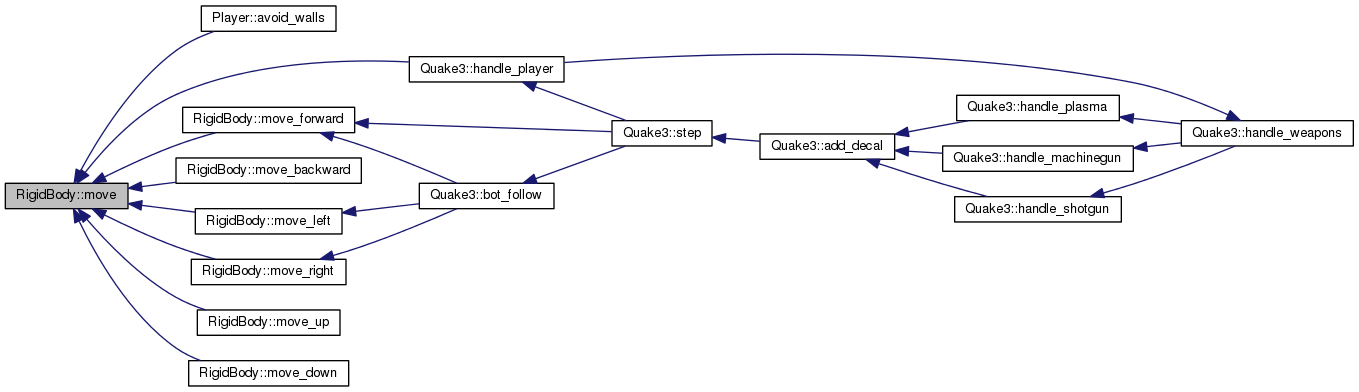
| bool RigidBody::move | ( | input_t & | input, |
| float | speed_scale | ||
| ) |
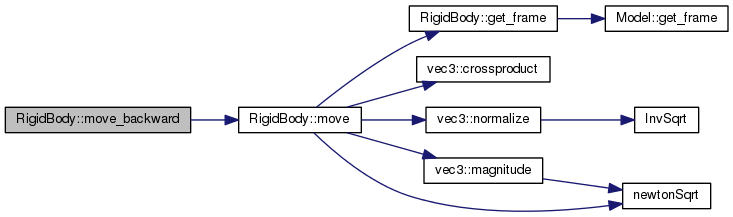
| void RigidBody::move_backward | ( | float | speed_scale | ) |
| void RigidBody::move_down | ( | float | speed_scale | ) |
| void RigidBody::move_forward | ( | float | speed_scale | ) |

| void RigidBody::move_left | ( | float | speed_scale | ) |

| void RigidBody::move_right | ( | float | speed_scale | ) |

| void RigidBody::move_up | ( | float | speed_scale | ) |
| void RigidBody::pid_follow_path | ( | vec3 * | path_list, |
| int | num_path, | ||
| float | max_velocity, | ||
| float | distance, | ||
| int | wait | ||
| ) |

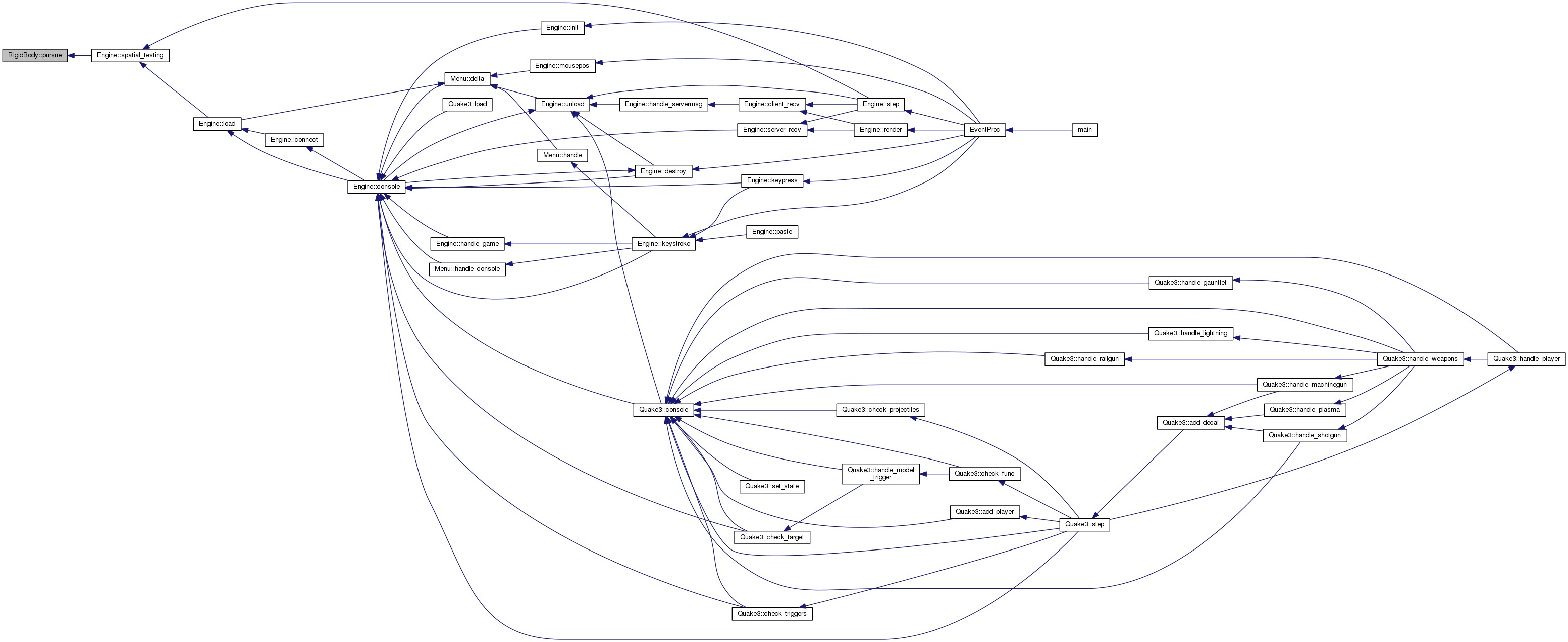
| void RigidBody::pursue | ( | ) |

| void RigidBody::recalc | ( | ) |


| void RigidBody::save_config | ( | cfg_t & | config | ) |

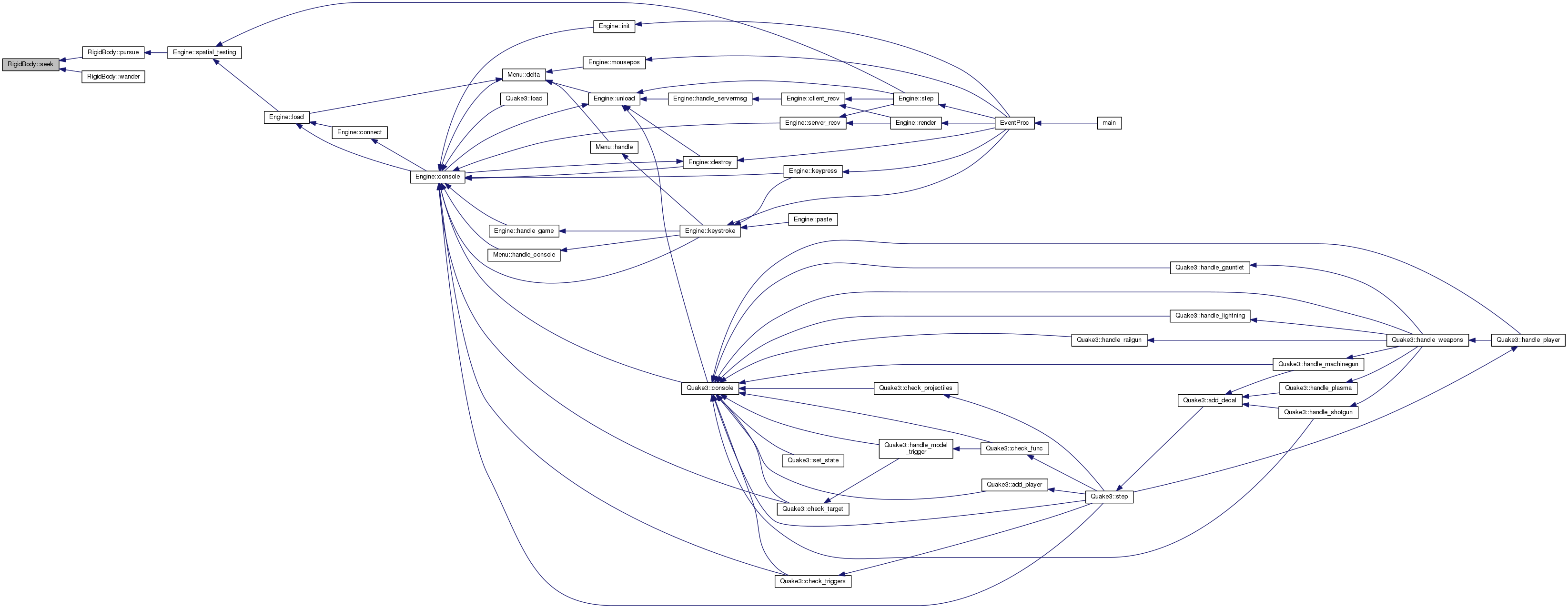
| void RigidBody::seek | ( | const vec3 & | position | ) |

| void RigidBody::set_target | ( | Entity & | target | ) |
| int RigidBody::train_follow_path | ( | vec3 * | target, |
| float | max_velocity, | ||
| float | distance, | ||
| int | wait | ||
| ) |

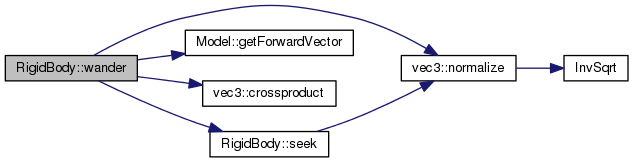
| void RigidBody::wander | ( | float | radius, |
| float | distance, | ||
| float | jitter | ||
| ) |
| vec3 RigidBody::angular_velocity |
| unsigned int RigidBody::bounce |
| int RigidBody::bsp_model_platform |
| int RigidBody::bsp_trigger_volume |
| bool RigidBody::flight |
| bool RigidBody::gravity |
| bool RigidBody::ground_friction_flag |
| bool RigidBody::hard_impact |
| unsigned int RigidBody::impact_index |
| float RigidBody::impact_velocity |
| matrix3 RigidBody::inverse_tensor |
| int RigidBody::jump_timer |
| bool RigidBody::last_water |
| bool RigidBody::lava |
| float RigidBody::mass |
| vec3 RigidBody::net_force |
| vec3 RigidBody::net_torque |
| bool RigidBody::noclip |
| matrix3 RigidBody::old_orientation |
| vec3 RigidBody::old_position |
| bool RigidBody::on_ground |
| func_path_t RigidBody::path |
| pid_state_t RigidBody::pid |
| bool RigidBody::pursue_flag |
| float RigidBody::restitution |
| float RigidBody::rotational_friction |
| bool RigidBody::rotational_friction_flag |
| bool RigidBody::sleep |
| bool RigidBody::slime |
| vec3 RigidBody::sphere_target |
| bool RigidBody::step_flag |
| int RigidBody::step_type |
| Entity* RigidBody::target |
| train_t RigidBody::train |
| float RigidBody::translational_friction |
| bool RigidBody::translational_friction_flag |
| vec3 RigidBody::velocity |
| bool RigidBody::water |
| float RigidBody::water_depth |
| vec3 RigidBody::wishdir |
| matrix3 RigidBody::world_tensor |
| int RigidBody::y_offset |
 1.8.2
1.8.2